摘要:差动螺旋传动是一种复合螺旋传动,有关该传动的计算是螺旋传动中的难点之一。如何深刻理解并掌握该传动的原理及计算,笔者从螺旋传动机构的结构分析入手对该传动的原理进行了阐述。
一、普通螺旋传动的类型及其运动判别――分析差动螺旋传动的基础
根据机构中组成螺旋副的两构件运动状态,普通螺旋传动分为两种基本类型(在此称之为I型和II型):
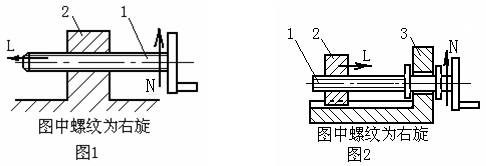
I型普通螺旋传动:一件固定不动,一件回转运动并作直线移动,如图1。该例图所示机构中只含有两构件:固定件为螺母2,运动构件为螺杆1;两构件间构成螺旋副。假设该传动采用右旋螺纹,螺杆1的回转方向如图中所示,由(左)右手定则:伸出右手,四指弯曲方向与螺杆1回转方向一致,大拇指指向——向左即为螺杆1(相对机架)的移动方向;由公式L=NPh可知:若螺杆转动一周,则其(相对机架螺母2)移动一个导程Ph。
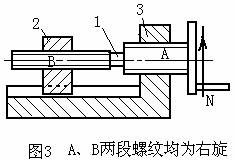
II型普通螺旋传动:一件原位回转,一件只作直线移动,如图2。图中螺旋机构由螺杆1、螺母2及机架3三个构件组成。三构件之间的运动副关系:螺杆1、螺母2之间组成螺旋副,螺杆1、机架3组成转动副,螺母2、机架3组成移动副。假定该传动中螺纹旋向为右旋,螺杆的回转方向如图中所示,由(左)右手定则:伸出右手,四指弯曲方向与螺杆回转方向一致,大拇指所指反向——向右即为螺母相对机架(或螺杆)移动的方向(因为螺杆与机架构成的是转动副――螺杆与机架之间无轴向相对运动)。由公式L=NPh可知:若螺杆转动了一周,则螺母向右移动一个导程Ph。
二、差动螺旋传动机构的结构分析——剖析差动螺旋传动原理的突破口
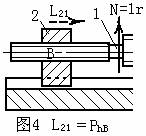
如图3所示一差动螺旋传动:由三个构件、移动螺母2、及机架3(固定螺母)组成。
该机构中构件之间的运动副关系分析如下:
a)移动螺母2、机架3两构件组成移动副;
b)螺杆1(A段螺纹处)与机架3(固定螺母)组成I型普通螺旋副(一件固定不动,一件作回转运动并作直线移动);
c)螺杆1(B段螺纹处)与移动螺母2则组成II型普通螺旋副(一件回转,一件只作直线移动)。
基于如上的结构分析,便可进一步对差动螺旋传动作深入的分析。
三、差动螺旋传动中活动螺母的移动分析――差动螺旋传动分析的聚焦点
假设螺杆1上两段螺纹A、B旋向均为右旋,导程分别为PhA、PhB;螺杆按图3中所示的回转方向转动1周,问移动螺母2将会产生怎样的运动?
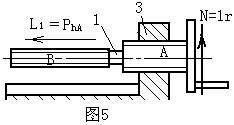
比较一下图3与图2的相同之处:螺杆1(在B段螺纹处)与移动螺母2组成II型普通螺旋副(螺杆1转动,螺母2移动),将该处结构单独分离,如图4所示:
由左右手定则可知:当螺杆1按图示回转方向转动1周时,移动螺母2相对螺杆1朝右移动一个等于导程PhB的距离L21;——这里的PhB值就是移动螺母2相对机架的实际移动距离吗?
对上面问题的回答:当然不是。因为图3中的螺杆1与机架3的运动副关系不同于图2中的螺杆与机架间的转动副关系,根据上面机构结构分析――螺杆1(在A段螺纹处)与机架3(固定螺母)组成的是I型普通螺旋副,如图5所示:当螺杆1按图示回转方向转动1周时,根据(左)右手定则可判断:整个螺杆1相对机架朝左移动了一个导程PhA;
这时可清楚地看到,移动螺母2相对机架的实际移动距离应该是螺杆1相对机架向左移动距离L1(=PhA)和移动螺母2相对螺杆1朝右移动的距离L21(=PhB)的合成,即:
L=L1—L21=1×(PhA-PhB)
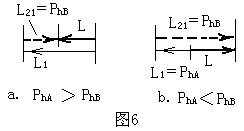
如果PhA>PhB,则螺母2移动方向与螺杆1(相对机架)的移动方向一致,朝左;如果PhA<PhB,则螺母2移动方向与螺杆1(相对机架)的移动方向相反,向右。以上分析的三个构件间的相对移动可用图6直观表达。
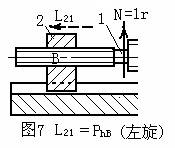
如果将B段螺纹的旋向改为左旋,且其它条件不变,则螺母2又将会产生怎样的运动呢?分析如下:
当螺杆1按图示回转方向转动1周时,应用两次左右手定则判断:移动螺母2相对螺杆1朝左移动了一个导程PhB的距离L21;整个螺杆1相对机架向左移动了一个导程PhA的距离L1,如图7;
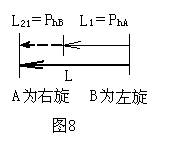
则移动螺母2相对机架的实际移动距离是:螺杆1(相对机架)向左移动的距离L1(=PhA)和移动螺母2相对螺杆1朝左移动的距离L21(=PhB)的合成,即:
L=L1+L21=1×(PhA+PhB)
显然,螺母2移动方向朝左——与螺杆1的移动方向一致。上面分析的三个构件间的相对移动运动状态可由图8表达。
四、差动螺旋传动的计算公式:——对差动螺旋传动分析的概括
经上面的详尽分析可概括总结出差动螺旋传动的计算公式:
L=N(PhA±PhB)
式中字母含义如下:
L――螺母2相对机架的实际移动距离;
N――螺杆1转动的周数;
PhA――固定螺母的导程(I型螺旋副的导程);
PhB――移动螺母2的导程(II型螺旋副的导程);
在对差动螺旋传动机构的结构和运动副关系进行详尽的分析的基础上,才能准确而透彻理解上述公式,进而才能正确掌握并运用它去解决实际问题。
关于差动螺旋传动计算公式的应用及其计算结果作以下几点说明:
① 计算公式括号中的固定螺母的导程(PhA)与移动螺母的导程(PhB)位置不要写反:前固(PhA)后活(PhB),按这样的顺序写便于根据计算的结果对移动螺母运动方向的进行正确判断;
② 计算公式中的两导程间加减号“±”的应用:当机构中两段螺纹的旋向相反时,两导程间用“+”号,表示机构运动时两类螺旋副中的移动件相对另一件产生的两移动方向一致;当机构中两段螺纹旋向相同时,则两导程间用“—”号,表示该机构运动时两类螺旋副中的移动件相对另一件产生的两移动方向相反;
③ 计算的结果L值符号的说明:L值符号若为正,则表明移动螺母2的移动方向与螺杆1的移动方向一致;L值符号若为负,则表明移动螺母2的移动方向与螺杆1的移动方向相反。
④ 移动螺母2的移动方向的判别:先正确判断螺杆1的移动方向,根据③的表述便可轻松得知移动螺母2的移动方向。
注意:图3所示差动螺旋传动机构中螺杆1与机架3(固定螺母)组成I型普通螺旋副(即:一件固定不动,一件边转边移),所以螺杆1的移动方向的判别是应用I型普通螺旋传动的左右手定则进行判定,这点一定要清醒的认识。
消息,Bitget宣布已恢复CRO - Ethereum网络的提币服务。对于暂停期间给用户带来的不便,Bitget深表...
2 本周关键经济事件:特斯拉与谷歌财报消息,本周将迎来多项关键经济事件:周二发布ADP就业变动数据,周三特斯拉和谷歌将公布财...
3 BANK热度上升,24h成交量放大至近7日平均消息,据a早期发行in监测,BANK过去24小时成交量放大至近7日平均水平的8.2倍,价格累计上涨...
4 某巨鲸在Hyperliquid持有CXMT空单,并挂出消息,据A早期发行in监测,某巨鲸在Hyperliquid以1倍逐仓做空18.84万份CXMT,仓位价值约126.72万美...
5 伊朗海军防空系统在南部拦截并摧毁了一消息,据伊朗塔斯尼姆通讯社:伊朗海军防空系统在南部拦截并摧毁了一架敌方的卢卡斯无人...
6 油价反弹,对冲基金对纽元空头头寸升至消息,近期全球油价反弹,对冲基金对纽元的空头头寸已经升至历史新高,达到29,582手,为自...
7 KuCoin合约将下架ROAMUSDT永续合约消息,KuCoin宣布将于2026年7月20日下架ROAMUSDT永续合约。为增强下架过程的公平性和稳定性,K...
8 某地址持有5.7万枚SPCX多单,浮亏超100万美消息,据A早期发行in监测,某地址持有5.7万枚SPCX多单,当前价值约714万美元,未实现亏损超过...
9 罗伯特·清崎看好黄金和白银的‘登月’消息,罗伯特清崎在经历严重回撤后,依然看好黄金和白银的前景。他表示,尽管价格大幅下...
10 油价因中东局势升级而大幅上涨消息,油价在新一周开盘时出现大幅上涨,周日晚上美国时间、周一早晨亚洲时间,因中东局...
成都来彰科技 蜀ICP备2025134723号-1
资讯来源互联网,如有版权问题请联系管理员删除。